To prepare for hiking in the mountainous area of Madeira, I bought a Garmin GPSMAP 67. Same GPS chip as my Fenix 7 and Edge 1040, but a better antenna. Due to the observation of some unexpected odd behavior with respect to the Fenix 7 and Edge 1040 and a disturbing error in the device, I do not trust it. Unless Garmin solves this error I am reluctant to use it. Therefore, I also bought its predecessor the Garmin GPSMAP 66sr as well, second hand. Both devices look the same, but differences exist. On some fora I found indication that this device should be more accurate. So lets put it to the test!
Important notice: during testing I found a serious issue on the GPSMAP 67 on which I reported in another post. Due to this issue the GPSMAP67 is unreliable because it might show your location with a large error. I reported it to Garmin Support but they don’t take it seriously and just refer to their FAQ and state it is ‘by design’. See also this topic on the Garmin forum.
As a kid I fantasized about how great it would be to have a map on which you could see where you are, like the Marauders Map of Harry Potter. Who could have thought that a couple of years later there would be a technology that makes it possible, a technology so brilliant that it even takes into account Einsteins’ special theory of relativity.
Since my first GPS I am always looking for the most accurate GPS for logging my sports and hiking trips. I started in 2007 with the Garmin GPSMAP 60csx, but it was quite bulky for running (I had to keep it in hand). I therefore switched to the relatively unknown I-gotU devices. They were succeeded by the TomTom weareables (Adventurer) and they seemed pretty accurate (I still use them for open water swimming, attached to my buoy). Since they were discontinued I switched to Garmin. On my bike I have used the Edge 810, Edge 830 and am currently using the Edge 1040. For running and swimming the Fenix 7 and for hiking I recently bought the GPSMAP 67. The latter 3 are currently the top-of-the-bill consumer models from Garmin that use multiple satellite systems.
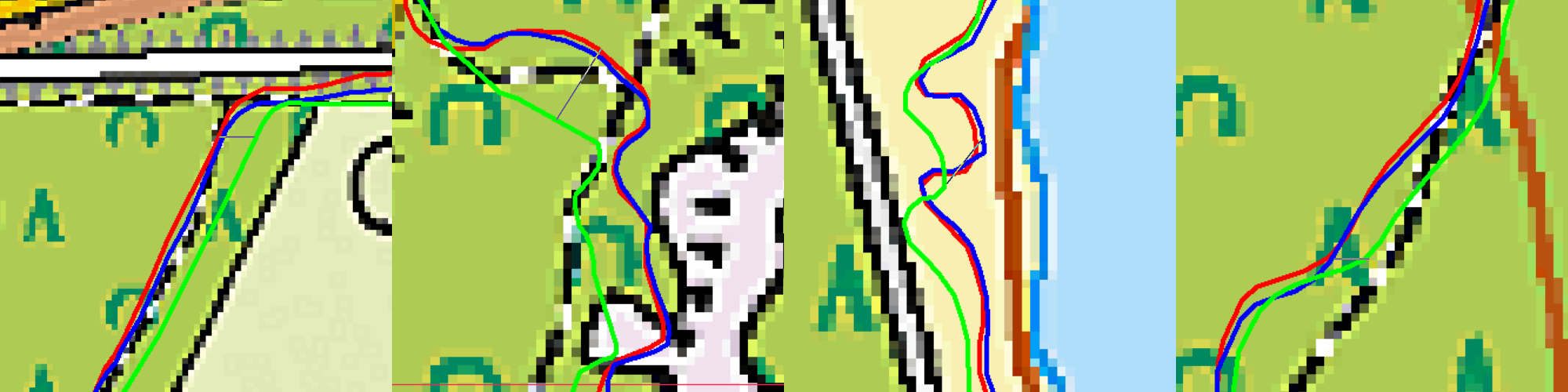
I’ve been using the Fenix 7 and Edge 1040 for quite some time now and they are giving good results and good agreement if I use them both (and I often do). I expected the GPSMAP67 to perform at least as good as them, if not better, since it has the same GPS chip, but a better antenna. So I took all three of them on a MTB trip through the forest. Auch! The result of the GPSMAP 67 was a bit disappointing: it’s track deviated from the Fenix 7 and Edge 1040 tracks. Though the Fenix and Edge are in good agreement with each other throughout the entire trip, the GPSMAP 67 showed deviations. And yes, two against one…
Red: Edge 1040, Blue: Fenix 7, Green: GPSMAP 67. Deviations from left to right (thin line): 12 m, 19 m, 11 m and 8 m.
Reason to put them on the test bench for a more thorough examination…
Disclaimer: yes, I am a GPS weirdo 🤪and I go to the last cm. If you think: ‘Man, what are you fuzzing about?‘, stop reading here.
Important notice: during testing I found a serious issue on the GPSMAP 67 on which I reported in another post. Due to this issue the GPSMAP67 is unreliable because it might show your location with a large error. I reported it to Garmin Support but they don’t take it seriously and just refer to their FAQ.
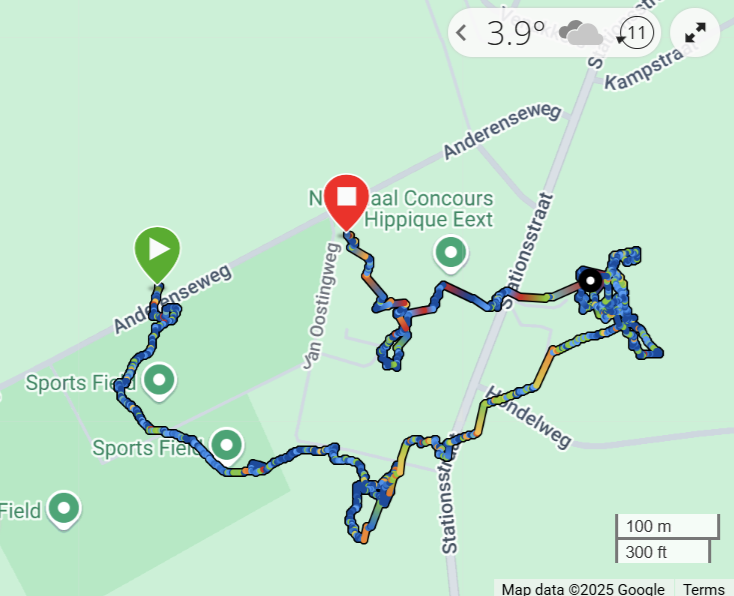
This is a report on an issue of the Garmin GPSMAP 67 in which we observe a huge drift of the location it indicates when the device is stationary (i.e. does not move). It seems to occur more often when satellite reception conditions are not optimal. Typical real life situations in which this occurs are when you pause during a hike in the forest or during Geocaching. Next picture shows the coordinate as recorded by the device overnight when placed stationary at the window. At the start the location is indicated correctly (green symbol). Then the logged coordinate starts wandering throughout the village where I live. A power cycle of the device immediately resolves the problem: the coordinate indicated jumps back to where it is supposed to be. This indicates it is a software error that can be resolved.
This image has been taken from the Garmin Connect website. An investigation has been made into the problem. This document reports on the findings.
While writing the previous post on Rijksdriehoeksmeting and OziExplorer, we came upon two map projections: Oblique Stereographic and Transverse Mercator. In this post we will have a look at the Mercator and Transverse Mercator projections and try to compare. Both projections are quite frequently used. So let’s have a look at them.
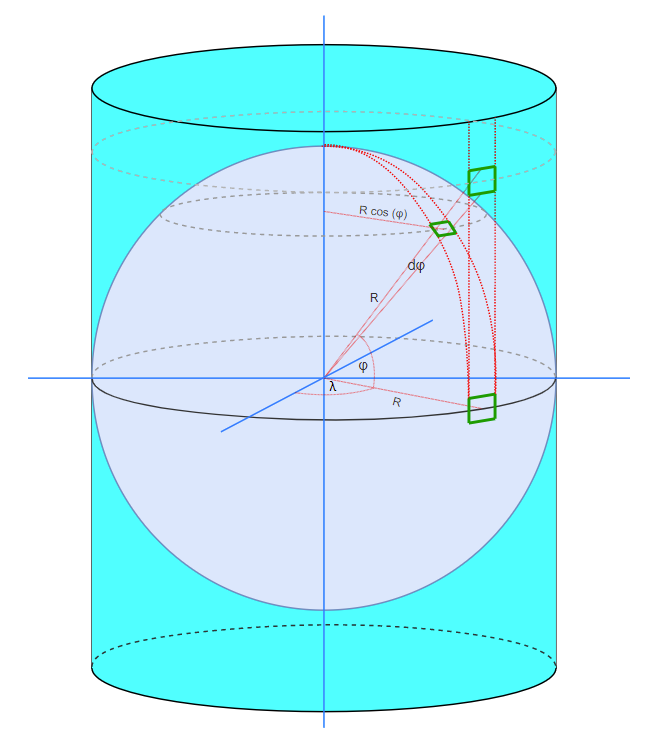
Mercator projections are cylindrical projections. The earth, represented by a spheroid or ellipsoid, is projected on a cylindrical surface. In contrast to a sphere, a cylinder can be flattened out as a 2D surface, the map.
Spherical Mercator Projection
The page is supported by a Java code project MapDatumConvert on Github in which I have programmed the projections and Map Datum conversions between Rijksdriehoeksmeting and WGS84.
OziExplorer is my favorite tool for working with topographical maps. Even in this era of mobile apps with all kind of online maps, I am a bit old fashioned by having my own collection of maps and OziExplorer is a great way to use them.
I am a Dutchy and here in the Netherlands the ‘authorities’ that are responsible for Dutch topographic maps use the Rijksdriehoeksmeting (RD) Map Datum.
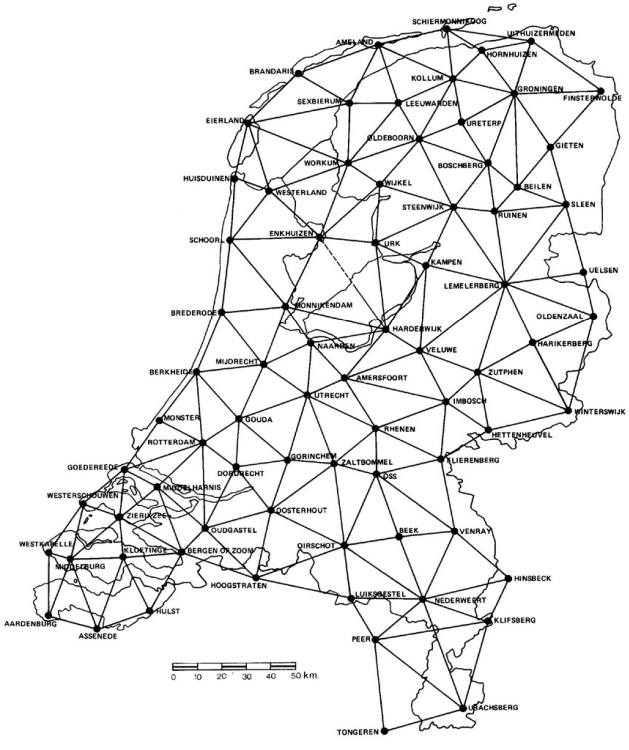
Primary reference points of the Rijksdriehoeksmeting Stelsel
In this blog we look at the Dutch maps and describe how to get them properly working in OziExplorer.
I am fascinated by navigation and maps. When I visit a new location one of the first things I do is getting a topographical map of the region. Sometimes I use historical maps, like the Werbata map (dating from 1911, see also Wikipedia) for my trips to Curacao. Since 2007 I log my activities (like running, hiking, cycling, swimming, surveying) using GPS (TomTom watch) and I like to plot these on a map online. Since surroundings change, I like not only to have the most current maps, but also historical maps. As a Dutchy a found the Kabouterbond maps worthwhile. Since 2012 the PDOK Basisregistratie Topografie (BRT) maps which can be downloaded for free in raster or vector format. PDOK is a cooperation between het Kadaster and the Dutch government.
So I end up with a collection of digital maps which I like to use with OziExplorer (for route planning e.g.) and online on my own websites. This post describes the way I proceeded to serve my maps for online usage.
PDOK based vector map from my server, described in this post