
Introduction
While writing the previous post on Rijksdriehoeksmeting and OziExplorer, we came upon two map projections: Oblique Stereographic and Transverse Mercator. In this post we will have a look at the Mercator and Transverse Mercator projections and try to compare. Both projections are quite frequently used. So let’s have a look at them.
Mercator projections are cylindrical projections. The earth, represented by a spheroid or ellipsoid, is projected on a cylindrical surface. In contrast to a sphere, a cylinder can be flattened out as a 2D surface, the map.
The page is supported by a Java code project MapDatumConvert on Github in which I have programmed the projections and Map Datum conversions between Rijksdriehoeksmeting and WGS84.
Mercator and conformity
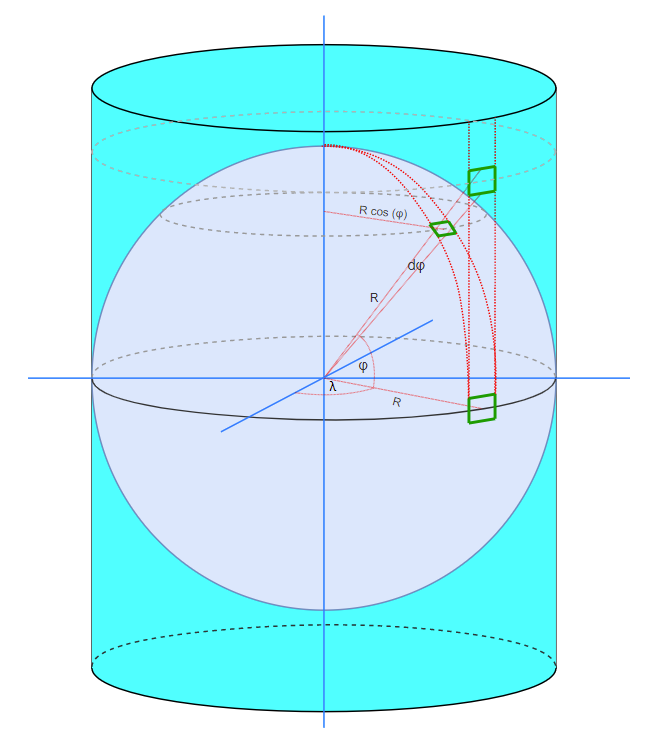
The Mercator Projection is shown above. A vertical cylinder is wrapped around the earth on which the map is projected. We start off by deriving the Mercator Projection formula in the spherical case, assuming conformity. A conformal map preserves shape during the mapping. This means a rectangle shape on the sphere is depicted as a rectangle on the map, though it may be scaled.
As you can see, meridians on the sphere become parallel verticals on the map. The same holds for the horizontal parallels. Meridians and parallels form a rectangular grid on the map.
On the equator the map is scale 1:1 (the cylinder touches the sphere at the equator, hence lengths are equal on sphere and map), towards the poles the map becomes stretched. In the figure above we have two small rectangles on the sphere, one at the equator with length Δx and width Δy, one at a latitude φ with length Δx’ and width Δy’. The rectangles are enclosed left and right by the same meridians as shown. The width of the rectangle at the equator is Δx. It makes up a part of Δx/2πR of the circumference at the equator. The width of the rectangle at latitude φ is Δx’. It makes up a part of Δx’/2πR’=Δx’/(2πR cos φ) of the circumference. Both parts are equal:
![\[ \frac{\Delta x}{2 \pi R} = \frac{\Delta x'}{2 \pi R \cos \phi } \]](https://blog.studioblueplanet.net/wp-content/ql-cache/quicklatex.com-73f86cd51c84803131c10283b98966d0_l3.png "Rendered by QuickLaTeX.com")
Rewriting:
![\[\Delta x' = \Delta x \cos \phi \]](https://blog.studioblueplanet.net/wp-content/ql-cache/quicklatex.com-dbb82f4f985a873f74b7049cd56cf1b2_l3.png "Rendered by QuickLaTeX.com")
Both rectangles are equally wide on the map (both have a width of Δx, since they are enclosed by the parallels). Therefore a rectangle at latitude φ is scaled 1/cos(φ) when mapping. In order to be conformal we require the same scaling for the height of the rectangle: Δy’=Δy cos(φ). To make up Δy’, the angle φ increases to φ+Δφ. In other words:
![\[R \Delta\phi = \Delta y' = \Delta y \cos \phi \]](https://blog.studioblueplanet.net/wp-content/ql-cache/quicklatex.com-2e324e45d70bdbbf56fa6ce62a8921ac_l3.png "Rendered by QuickLaTeX.com")
Rewriting:
![\[ \frac{\Delta y}{\Delta \phi} = \frac{R}{ \cos \phi } \]](https://blog.studioblueplanet.net/wp-content/ql-cache/quicklatex.com-c3b531d7c6afb4ffb9da60f2f9c10949_l3.png "Rendered by QuickLaTeX.com")
In the limit where Δφ approaches 0, we find:
![\[\frac{dy}{d\phi} = \frac{R}{ \cos \phi }\]](https://blog.studioblueplanet.net/wp-content/ql-cache/quicklatex.com-d2d4243bf8fe4c49a5ca8eb68f83e848_l3.png "Rendered by QuickLaTeX.com")
If we want to find the y coordinate we have to integrate:
![\[ y = R \int_0^\phi \frac{1}{ \cos \phi } = R \ln \left[ \frac{1}{ \cos \phi} + \tan \phi \right] + C\]](https://blog.studioblueplanet.net/wp-content/ql-cache/quicklatex.com-ea096e7d6b8a52cc1766f25881301e85_l3.png "Rendered by QuickLaTeX.com")
If we assume the equator is the x-axis, hence φ=0, y=0 then C=0.
For the Easting x we simply find
![\[ x = R (\lambda - \lambda_0) \]](https://blog.studioblueplanet.net/wp-content/ql-cache/quicklatex.com-b3ead2bf3b8fde428d0a18cb010ccb52_l3.png "Rendered by QuickLaTeX.com")
Here is λ0 the longitude of the central meridian of the projection (in the picture above λ0=0). Note that φ, λ and λ0 are in radians.
Summarizing:
![\[ y = R \ln \left[ \frac{1}{ \cos \phi } + \tan \phi \right] \]](https://blog.studioblueplanet.net/wp-content/ql-cache/quicklatex.com-a3c5f137217af511440638821bf0eb94_l3.png "Rendered by QuickLaTeX.com")
The ellipsoidal form, without derivation:
![\[ x = a (\lambda - \lambda_0) \]](https://blog.studioblueplanet.net/wp-content/ql-cache/quicklatex.com-82c4479ecdca1148cbdc7ed8ce1473de_l3.png "Rendered by QuickLaTeX.com")
![\[ y = a \ln\left[ tan \left( \frac{\phi}{2} + \frac{\pi}{4} \right) \left(\frac{1-e \sin \phi }{1+ e \sin \phi }\right)^{\frac{e}{2}} \right] \]](https://blog.studioblueplanet.net/wp-content/ql-cache/quicklatex.com-6b47e891a50495bd2c14143ba11abc22_l3.png "Rendered by QuickLaTeX.com")
In this equation a represents the radius along the long axis of the ellipsoid, at the equator and e the eccentricity of the ellipsoid.
Web Mercator vs. Mercator
A popular projection is Pseudo Mercator or Web Mercator. It is used in combination with the WGS84 Map Datum for popular web maps like Microsoft and Google maps and Open Street Map. This projection is known under a number of ESPGs, one of the more recents: ESPG:3875.
The ESPG site warns: Not a recognised geodetic system. Uses spherical development of ellipsoidal coordinates. Relative to WGS 84 / World Mercator (CRS code 3395) gives errors of 0.7 percent in scale and differences in northing of up to 43km in the map (21km on the ground).
Absolute error
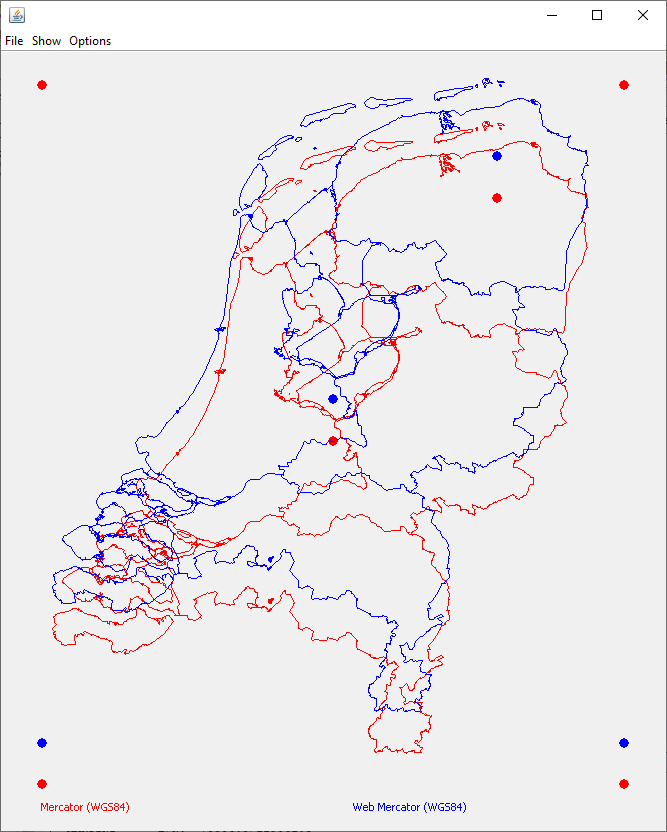
Web Mercator takes WGS84 coordinates based on the WGS84 ellipsoid, and executes the Spherical Mercator projection. Though this is easier to implement, it leads to considerable datum errors: the Easting coordinate (x) is equal in both projections, the Northing coordinate (y) however differs significantly. In the picture below the outline of the Netherlands is projected using both Mercator and Web Mercator Projections. The location of The Martini Toren in Groningen and OLV Toren in Amersfoort are shown, as well as the calibration points in the corners ([lat, lon]=[53.80, 3.1], [50.70, 7.30], [50.70, 3.10], [53.80, 7.30] in WGS84).
For the Martini Toren in Groningen the software shows a Northing error of 34.2 km.
Relative error
The Web Mercator projection is pretty okay for displaying maps, tracks and coordinates. We can fit both Projections by fitting the calibration points (top-left, bottom-right), using scaling and translation. This results in next image. Note that we use the same scaling for Northing and for Easting in order not to distort the projection. This results in a slight fit error for Easting as can be seen in the right hand calibration points. When we calculate the distance between OLV in Amersfoort and the Martini Toren in Groningen, we find 235.153 km for Mercator and 235.554 km for Web Mercator Projection. A difference of 401 m, which is relatively large. Note that these distances are according to the Map Datum (Northing, Easting). As we have seen above the map is being stretched towards the poles, with a scaling of 1/cos φ. The average latitude φ is about 52.5°, this factor is 1.64. So the real distances are around 143 km. In next sections we will look at some other projections that do better.

Transverse Mercator vs. Mercator Projection
The Transverse Mercator Projection is a cylindrical projection. However, now the cylinder is rotated 90° and is aligned around a Central Meridian. The Central Meridian is chosen such that the area of interest is within a small region around this Central Meridian. Since at this Meridian the cylinder touches the spheroid or ellipsoid, the scale in this area is about 1:1. Easting and Northing meters correspond to real meters.
We can compare Mercator to Transverse Mercator (with the Central Meridian through OLV Amersfoort), but we have to fit, since the scaling vary. In the fit we center the OLV on the center of the canvas and only use scaling based on the top-left and bottom-right calibration points. As is obvious the distortion is different in both projections as we might expect.
Universal Transverse Mercator (UTM)
A popular projection for the entire globe is Universal Transverse Mercator. As discussed above, the projection is most accurate around the Central Meridian. UTM uses therefore not one Transverse Mercator but 60, each rotated by 6°. So each projection covers +/- 3° around the Central Meridian. In this way the globe is subdivided in zones. The Netherlands is covered by two zones: 31N (ESPG:25831, 0-6°) and 32N (ESPG:25832 6-12°). A coordinate is indicated by zone, easting and northing, like 31N 0663304 5780984 for OLV in Amersfoort. Note that earlier versions of the UTM (like ESPG:23031 and ESPG:23032) used another Ellipsoid.
Oblique Stereographic vs. Transverse Mercator
As was explained in the blog about Rijksdriehoeksmeting and OziExplorer, Rijksdriehoeksmeting uses the Oblique Stereographic Projection, which is a planar projection.
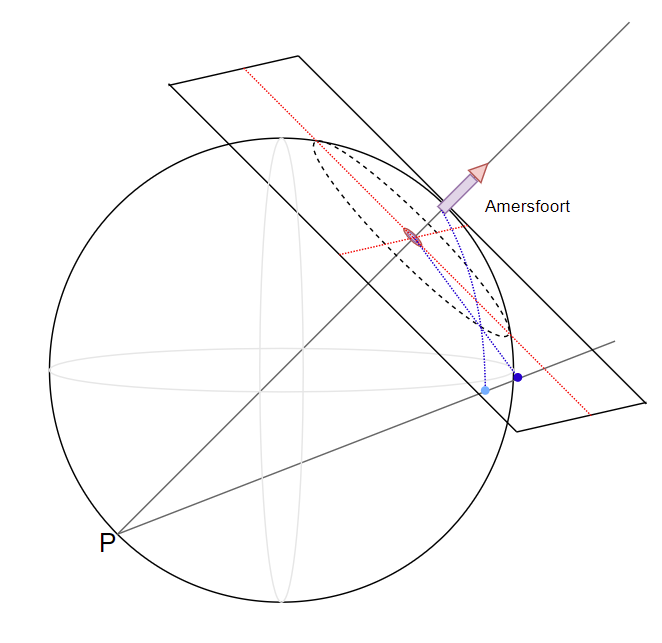
In OziExplorer we approximate this projection with a Transverse Mercator Projection since the Oblique Stereographic Projection is not well supported apparently. In next diagram we present both projections without fit, so easting and northing are used as calculated (both are scaled with the same factor to get them on the map canvas.
For the Transverse Mercator we use the OLV in Amersfoort as Center and use the same false easting and false northing parameters. We also use the same scaling factor of 0.9999079, effectively lowering the cylinder within the ellipsoid. This has the advantage that the error is minimized within the area of the Netherlands. We use the WGS84 Map Datum and coordinates whereas for the Oblique Stereographic Projection we use the RD Map Datum and coordinates.
As you can see in the comparison the fit is pretty close. When we compare the easting and northing of OLV and Martini Toren, we find the OLV in both projections (by definition) on [155000, 463000], hence no difference. We find a difference in the easting and northing of the Martini Toren of [-5.8m, 0.6m] between both projections. The distance between both towers is 142826.9 m for Stereographic, 142824.2 m for Transverse Mercator, a difference of less than 3 m. For practical use I think this is close enough.
Conclusion
In this blog we looked at a couple of popular projections and applied them to the country of the Netherlands. Mercator is a conformal projection but results in pretty large distortion/scaling which increases towards the poles. Web Mercator is an easy projection that is good for visualizing tracks, waypoints, etc, but results in deviations with respect to Mercator.
The Transverse Mercator solves the scaling by aligning the horizontal cylinder with the area of interest. We’ve shown that it can be used as a good approximation for the Oblique Spherical Projection used for Rijksdriehoeksmeting.
For me this was a nice exercise, especially the programming, to get better understanding how Map Projections and Map Datums (Data) work. I hope you found it also useful.